机器人应用领域中,物流系统的纸箱包装箱快速码垛是一个非常重要的市场,但由于机器人手爪夹具的技术局限,纸箱包装箱机器人码垛效率是其中的一个瓶颈。目前国内的技术仍主要采用一次抓取两件或三件的码垛方式,如果能实现整层抓取码垛,则机器人码垛的效率会提高3~5倍,达到每小时3000箱的码垛能力,将大大高于目前市场上专用的码垛系统,为物流系统中得码垛行业带来革命性的变化。
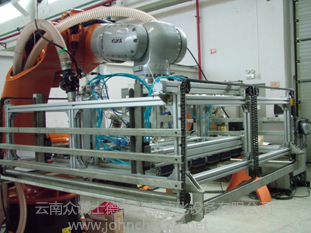
我公司以大面积真空吸盘为主要构成单元,开发出适用于整层纸箱包装箱码垛的机器人手爪夹具,且为了提高机器人的运行速度和码垛效率,在夹具上还配置气动辅助夹抱兜底机构,大大提高了系统的可靠性。目前已在食品饮料行业得到了突破性的应用,随着该产品的进一步改进和市场推广,今后几年中必将获得规模化的应用。