 |
|
|
|
ima6红河卷烟厂机器人码拆垛系统改造解决方案描述
红河烟厂是一家以管理先进、自动化程度高而闻名全国的烟草企业,其物流系统是目前国内自行研制开发的功能最齐全、规模最大、涉及范围最广的自动化物流系统典范之一。该厂于98年在自动化生产线上率先使用了机器人来实现香烟成品的码拆垛及辅料配盘,是机器人技术在国内烟草行业的成功应用案例之一。但由于红河烟厂的不断壮大,产量不断增加,加上原来系统设计的缺陷,原来的机器人拆垛系统已经不能满足现在的生产了。
原拆垛机器人的夹具系统采用了三组吸盘(每组12个波纹吸盘),每次抓取2~3件烟箱至放烟工位后,每次释放一件烟翻转。这种方式存在以下几个问题:
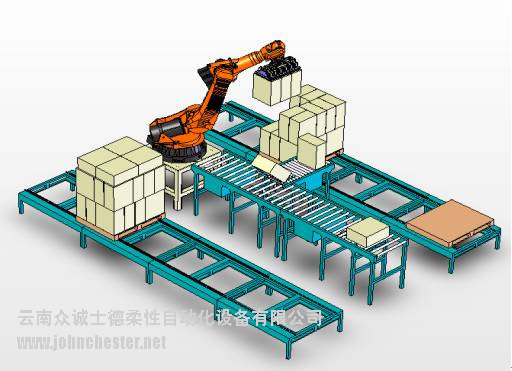
如图所示

1.由于采用了波纹吸盘,在机器人抓取烟箱运动到放烟工位的运动过程中造成烟箱晃动过大,不但容易损坏烟箱表面,而且机器人只能缓慢运行;
2.机器人在拆码过程中,由于各品种的烟箱材质不一致,气密性存在差异,传统的真空吸盘在吸取纸箱的过程中偶尔出现掉箱的现象,不但损伤了烟箱,还导致了系统的停机现象;
3.原夹具使用的是小口径的单级真空发生器,抽吸量小,且容易堵塞,导致系统运行稳定性较差,需经常人工维护;
4.拆垛翻机构与机器人匹配性不好,采取了一组吸盘释放一件烟,翻转机构翻转完毕后,机器人移动第二组吸盘至放烟位置,再释放、翻转,机器人和翻转机构相互等待,严重影响拆垛效率。
我公司针对实际情况,为红河烟厂制定的专门的解决方案,其平面布局图如下:
1.采用德国SCHMALZ公司针对纸箱开发的FX系列大面积真空机器人夹具系统,本系统采用模块化的设计,结构轻巧,自带多级真空发生器及检测器件,采用小孔多路的吸附方式,可适应比较粗糙的工件表面,最大程度地提高机器人抓取物料的抓力和可靠性;
2.采用我公司自行设计的翻转机构,增加积放工位,机器人抓取烟箱直接放到该工位上,减少机器人和翻转机构的配合,最大程度的提高机器人的拆垛效率。
改造后的机器人拆垛系统,不仅解决了原来存在的掉烟、晃动、纸箱透气、真空发生器堵塞等诸多问题,使系统运行更加稳定,设备掉烟率达到百万分之七,还大大提高了机器人的拆垛效率,原系统拆垛一个托盘需2分50多秒(约8件/min),而改造后仅需1分40秒(大于14件/min),效率提高75%。

